스피커시스템에서 스윗스팟이란 가장 좋은 소리를 들을 수 있는 위치, 범위를 말한다. 스테레오 시스템에서 스위스팟의 위치는 좌우 스피커의 소리가 모두 전달되는 가운데 지점 부근에 형성이 된다. 이로 인해 가운데 지점을 제외한 좌, 우측의 위치에서는 스윗스팟과는 다른 사운드 이미지가 형성된다. 입체음향 시스템은 스피커의 구성과 설치 위치가 스테레오 시스템과는 다르게 여러 개의 스피커를 배치한다. 또 음원 재생 시 음량과 시간차를 이용해 보다 넓은 커버리지를 생성하므로 사운드의 확산이 이루어지고 스윗스팟이 넓게 형성된다.
본 글에서는 입체음향 시스템의 객체의 위치에 따른 음압 분포도를 기초로 스피커 커버리지 패턴을 분석해 스윗스팟의 범위 및 스테레오와의 차이를 고찰해본다.
1. 서론
입체음향의 대표적인 효과는 크게 두가지로 스윗스팟의 확대와 객체의 위치표현 시 편리함이 있다. 그 중에서도 가장 큰 효과인 음장감의 확대. 즉 스윗스팟이 확대되는 방식에 대한 이해가 필요하다.
일반적으로 스윗스팟은 사운드의 이미지와 관련된 측면과 사운드의 퀄리티에 관련된 측면이 있다. 사운드의 이미지와 관련하여 스테레오 시스템의 사운드 이미지 형성은 스피커 커버리지가 겹치는 부분, 즉 스피커 중앙(그림1)에서 완전하게 발생한다.
하지만 어느 한쪽으로 치우치면 스테레오 사운드 이미지 형성은 중앙과는 다른 이미지를 형성한다. 좁은 스윗스팟으로 인한 사운드 이미지의 편차는 스테레오 시스템의 대표적인 문제이다. 이런 스테레오 사운드 이미지의 편차를 입체음향 시스템에서는 스피커의 추가설치와 사운드 재생 시 알고리즘을 통해 연산 후 재생하는 것으로 스윗스팟을 확장시켜 음장감을 확산시킨다.
입체음향 시스템의 각 위치 별 음원 재생 시 각 스피커에서 어떤 연산을 거쳐 재생이 되는 지를 측정하고 그 결과를 시뮬레이션 프로그램으로 분석하고자 한다.
2. 스테레오 시스템의 스윗스팟
2.1 스윗스팟
팬텀 이미지를 기본으로 한 스테레오 스윗스팟은 그림 1처럼 형성이 된다. 스테레오 시스템에서 스윗스팟은 L, R 스피커의 커버리지에 모두 해당되어야 좋은 팬텀 이미지를 형성할 수 있다.
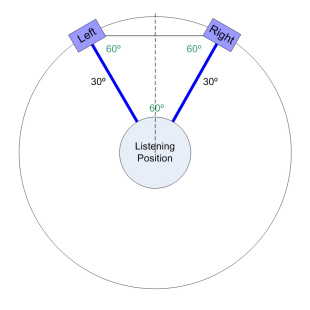
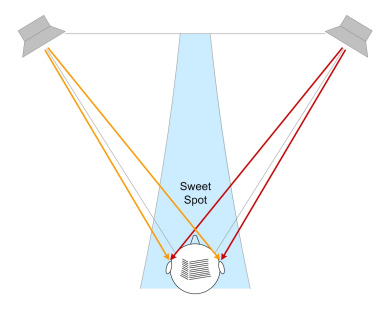
그림2는 스테레오 시스템의 음압 분포를 비교(Relative)한 자료로 스테레오 시스템 좌, 우 동시 재생시와 좌측 스피커만 재생시의 음압 분포 패턴을 통해 스윗스팟의 음압분포를 확인할 수 있다. 동일한 음량과 거리차로 재생되어야 균등한 패턴과 고른 주파수 밸런스를 가지게 된다.
2.2 소리 위치 표현 방법
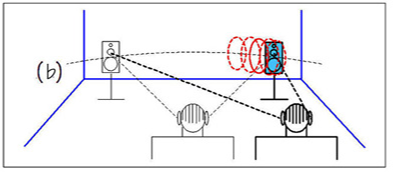
스테레오 시스템에서 소리의 위치를 표현하는 방법은 두 가지로 레벨(Level)과 시간지연(Delay)을 이용한 방법이다. 그림 3-a는 우측 스피커의 레벨만 증가되면 음원의 위치가 레벨이 증가된 우측 스피커로 이동한다. 그림 3-b는 우측의 스피커에 시간차로 인한 0.5ms 지연(Delay)이 발생하면 먼저 도달하는 좌측 스피커 방향으로 위치를 인식하게 된다.


2.3 스테레오 시스템 스윗스팟의 한계
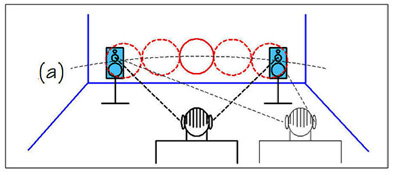
그림 4(a)처럼 중앙 지점에 위치하면 팬텀이미지로 인해 사운드 이미지가 정확히 형성되지만 우측에 위치하게 되면 우측의 스피커 위주로 듣게 된다. 한쪽 스피커로 위주로 듣게 되기 때문에 중앙지점과는 다른 이미지가 형성이 된다.
이는 개인공간 같이 작은 스윗스팟으로도 충분한 공간에서는 문제가 적을 수 있지만, 대형 공연장 등 큰 공간에서는 스윗스팟의 편차가 존재하는 한계가 발생한다.
3. 입체음향 시스템의 스윗스팟
입체음향 시스템에서는 사운드 객체의 위치에 따라 각 스피커에서는 재생하는 레벨(Level)과 시간차(Delay)가 다르게 생성이 된다. WFS 알고리즘을 사용한 시스템의 입체음향 시스템의 객체 배치에 따른 커버리지를 측정하기 위해 이머시브 엔진의 출력을 측정해 이를 토대로 시뮬레이션 프로그램에 입력하여 아래(그림9, 10)의 음압분포도 커버리지를 형성했다.

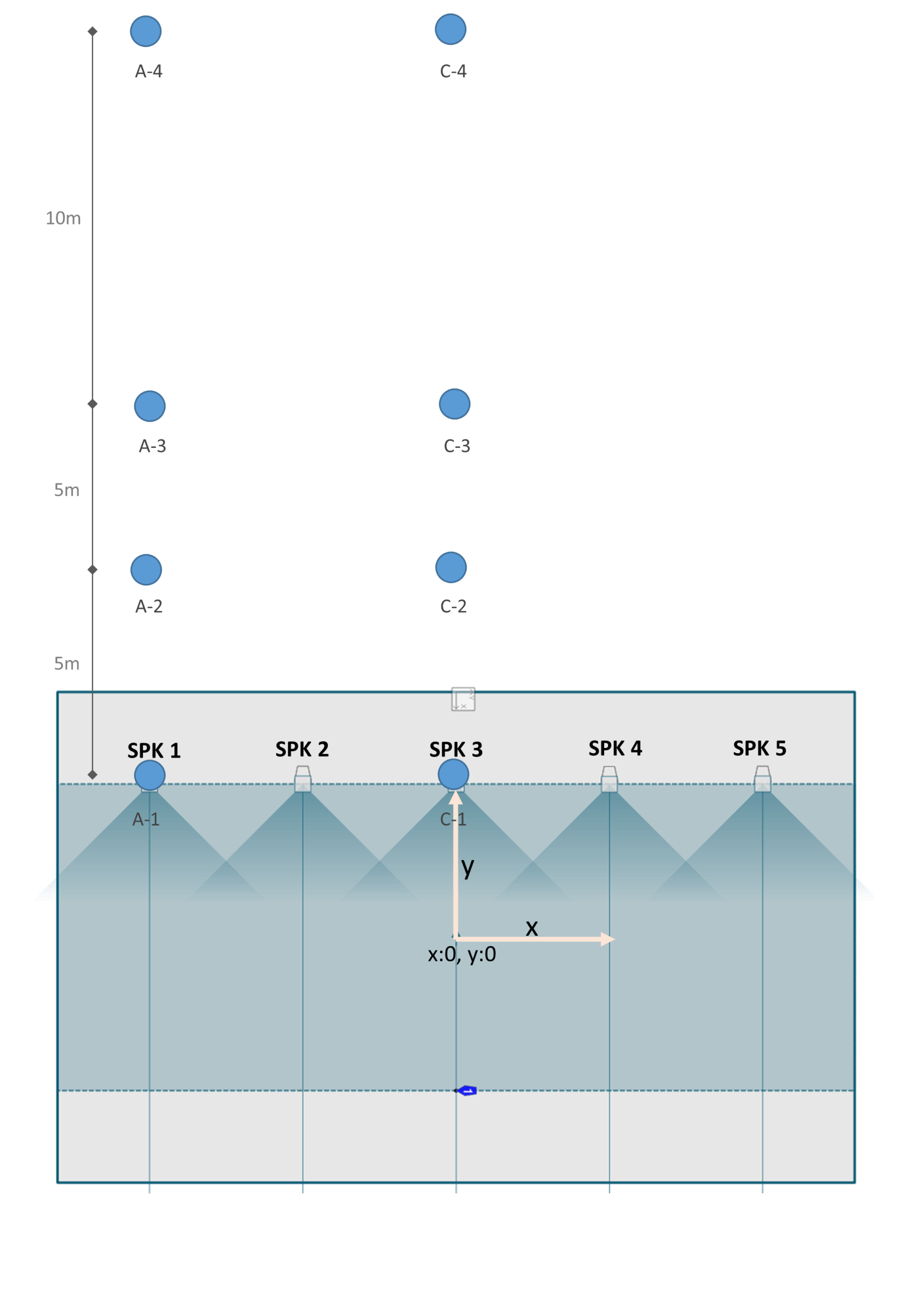
그림 6는 입체음향 시뮬레이션 스피커 배치도로 객체의 위치 ‘ⓐ좌측’과 ‘ⓑ중앙’, 각 위치 재생 시 스피커의 위치를 나타낸다.

3.1 객체의 배치에 따른 스피커 음압분포도 – ⓐ좌측
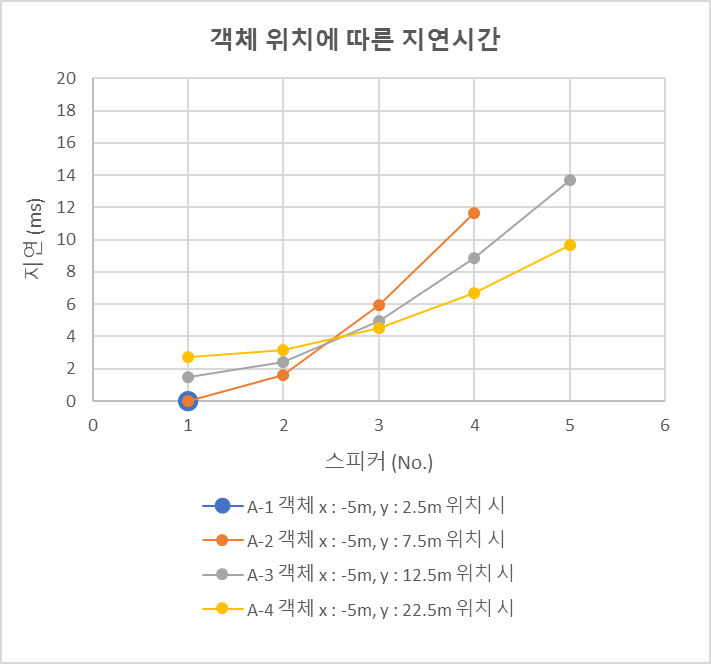
그림 7은 사운드 객체가 x: -5m, y:12m의 위치에 있을 때의 각 스피커별 지연 시간을 나타낸다. 객체에서 멀리 위치한 스피커 일수록 시간의 지연이 더 발생해서 재생이 되는 것을 확인할 수 있다.

그림 8은 그림 7과 동일한 사운드 객체의 위치에서 SPL의 변화를 나타낸다. 역시 스피커와 사운드 객체와의 거리가 멀수록 레벨이 줄어드는 것을 확인할 수 있다.
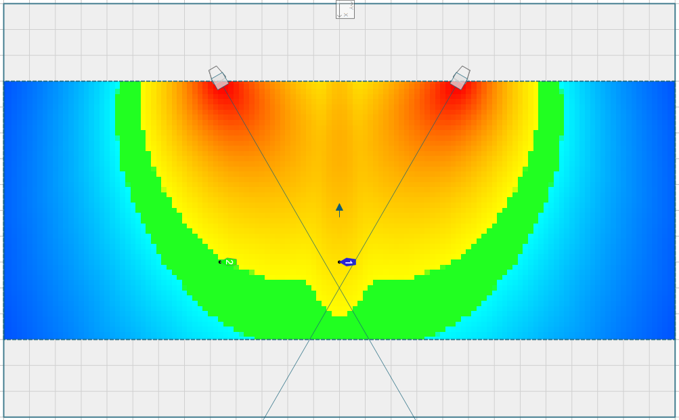
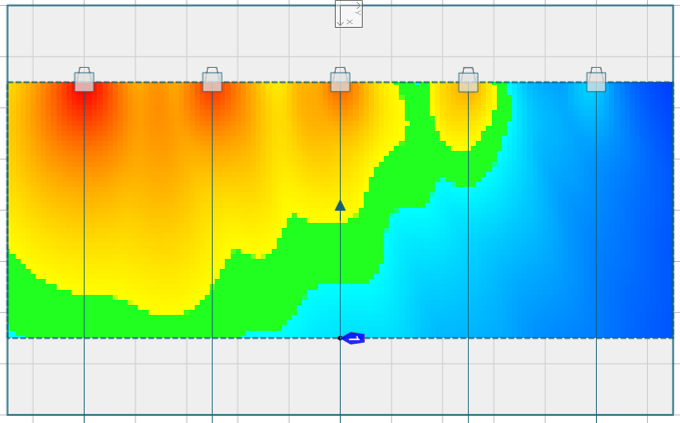
이 데이터를 시뮬레이션 프로그램에 대입 시 그림 9과 같은 음압 분포도를 나타낸다. ‘ⓐ좌측’ 사운드 소스 재생 시 각 스피커 별 시간차와 레벨차이가 존재함을 알 수 있다.


3.2 객체의 배치에 따른 스피커 음압분포도 – ⓑ중앙
그림 10은 사운드 객체가 x:0m, y:12m의 위치에 있을 때의 각 스피커별 지연 시간을 나타낸다. 사운드 객체의 가운데 부분에서 가장 짧은 지연 시간으로 재생되고, 거리가 멀어질수록 지연이 발생한다.
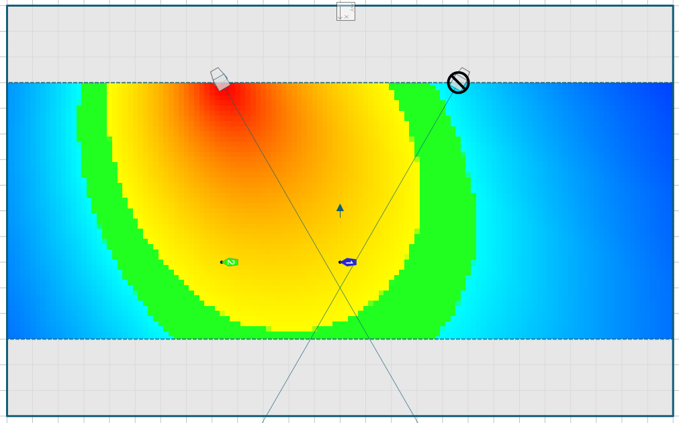
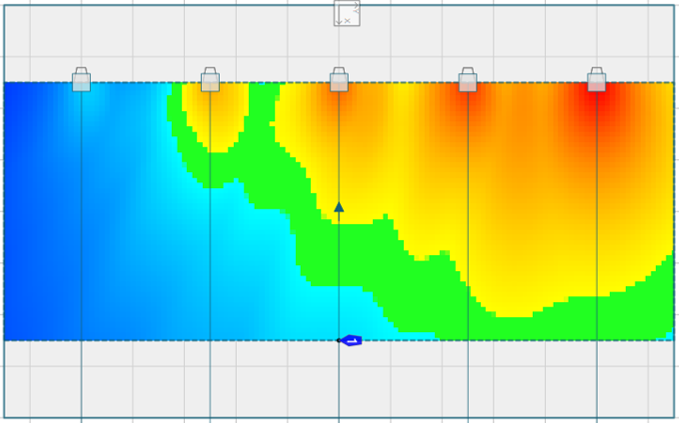
그림 11의 SPL 관련 자료의 경우에는 사운드 객체가 위치한 가운데 부분이 제일 음압이 낮은 것을 확인할 수 있다. 이를 토대로 시뮬레이션 프로그램 대입 시 그림 12와 같은 음압분포도에 따른 패턴이 나타난다. ‘ⓑ 중앙’ 사운드 소스 재생 시 각 스피커 별 시간차와 레벨차이가 존재함을 알 수 있다.



4. 스테레오와 입체음향 시스템 음압분포도 비교
입체음향 시스템의 그림 9 ‘ⓐ 좌측’ 과 대칭되게 ‘ⓒ 우측’ x:5m, y:12m 객체 배치 시 ‘ⓐ 좌측’+‘ⓒ 우측’ 음압분포도는 아래와 같다


5. 고찰 및 결론
청감상으로 입체음향의 스윗스팟은 스테레오의 스윗스팟보다 매우 넓다. 또한 위의 시뮬레이션을 통해서 파악한 음압분포도 또한 스테레오 보다 넓고, 많은 부분을 차지하고 있음을 알 수 있다.
스테레오 스윗스팟에서 표현되는 사운드 이미지 구현과 사운드 퀄리티 확장이 입체음향에서는 음장의 확장이라는 더 큰 범위의 용어로 표현된다. 여러 스피커의 경로를 통해 여러 객체의 레벨과 시간을 각각 연산하여 사운드 이미지와 사운드 퀄리티의 확장을 가져온다. 스테레오의 중앙지점을 벗어나 좌, 우측에 스윗스팟의 확장을 구현하는 것이다.
이 스윗스팟의 확장. 음장감의 확장을 통해 입체음향에서 객체의 위치와 이동에 따른 결과를 예측하여, 디자인하고 적용하는 다양한 노력이 필요하다.
참고 문헌
1. https://av-info.eu/index.html?https&&&av-info.eu/audio/stereo.html
2. 이태진 외, 훤히 보이는 생활 속 오디오 기술 –한국전자통신연구원(2011).
3. https://www.linkwitzlab.com/The_Magic/The_Magic.htm
6. 추가별첨 : 패닝알고리즘별 패턴 분석
6.1 스테레오 믹싱과 이머시브 믹싱
스테레오와 이머시브 시스템의 스윗 스팟이 다르게 형성되는 것으로 인해서, 이머시브 믹싱에도 기존 스테레오 믹싱과는 다른 접근이 필요하다. 이머시브 믹싱의 완성도는 스테레오 믹싱이 많은 시간동안 여러 노하우로 완성도가 높아진 것처럼 다양한 경험과 시도를 통해 높아지게 될 것이다.
이머시브 믹싱에서도 제일 중요한 것은 귀로 듣고, 가장 좋은 소리를 만들어 가는 것이다. 이는 스테레오 믹싱과 동일하다. 하지만 이머시브 믹싱에서는 객체의 위치와 이동이 기존 스테레오 믹싱과는 다르기 때문에 이에 대한 정확한 이해가 이머시브 믹싱에서 좋은 결과로 나타난다.

6.2 제조사별 이머시브 패닝알고리즘
공연장 및 라이브 환경에서 사용할 수 있는 이머시브 엔진으로는 L-acoustic의 LISA, d&b의 Soundscape, Astro Spatial Audio의 SARA II 그리고 FLUX의 Spat Revolution이 대표적이다. 또 최근에는 Adamson의 Fletcher Machine, Coda의 Space Hub 등 다양한 종류의 이머시브 엔진이 출시되고 있다
| 제조사 | 모델명 | 방식 | 패닝알고리즘 |
| L-acoustic | LISA | VBAP/MDAP | Amplitude-based |
| d&b | Soundscape | Delay-based | |
| Astro Spatial Audio | SARA II | WFS | Delay-based, Amplitude-based |
| Flux | SPAT Revolution | WFS, VBAP, MDAP, ST | Delay-based, Amplitude-based |
이처럼 다양한 이머시브 엔진만큼 여러 종류의 패닝 알고리즘이 적용되어 있다. 패닝알고리즘에 대한 이해와 경험이 이머시브 믹싱의 퀄리티와 직결 된다. 두 제조사의 엔진을 비교하고 객체의 위치에 따른 패닝 알고리즘 WFS, VBAP를 비교하여 분석하고자 한다.
6.3 객체 위치에 따른 패닝 알고리즘 비교분석

스피커를 위치시켰다. 좌측 A 지점 스피커를 기준으로 5m, 10m, 20m 뒤에 객체를 배치 시켰을 때 SPK1, 2, 3, 4, 5의 스피커로 재생되는 음압 및 딜레이 타임을 측정하였다.
| 제조사 | 모델명 | 패닝알고리즘 | 시뮬레이션포인트 |
| ASA | SARA II | WFS | A-1, 2, 3, 4 C-1, 2, 3, 4 |
| Flux | SPAT Revolution | WFS | A-1, 2, 3, 4 C-1, 2, 3, 4 |
| Flux | SPAT Revolution | VBAP | A-1, 2, 3, 4 C-1, 2, 3, 4 |
시뮬레이션은 각 포지션별 스피커 상호간의 상대적인 패턴만 표현되는 Relative모드를 사용하여 객체의 레벨과 시간에 의해 생성되는 음압분포를 +1, -1db 로 표현한다
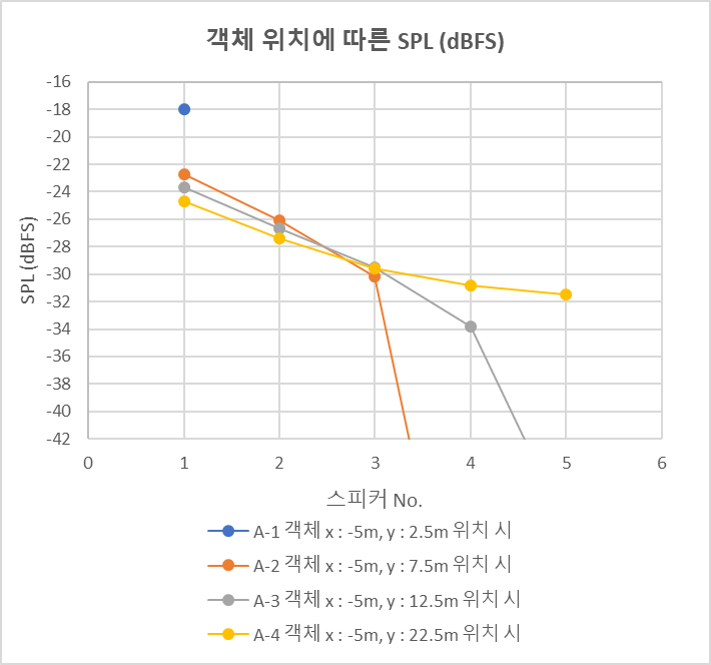
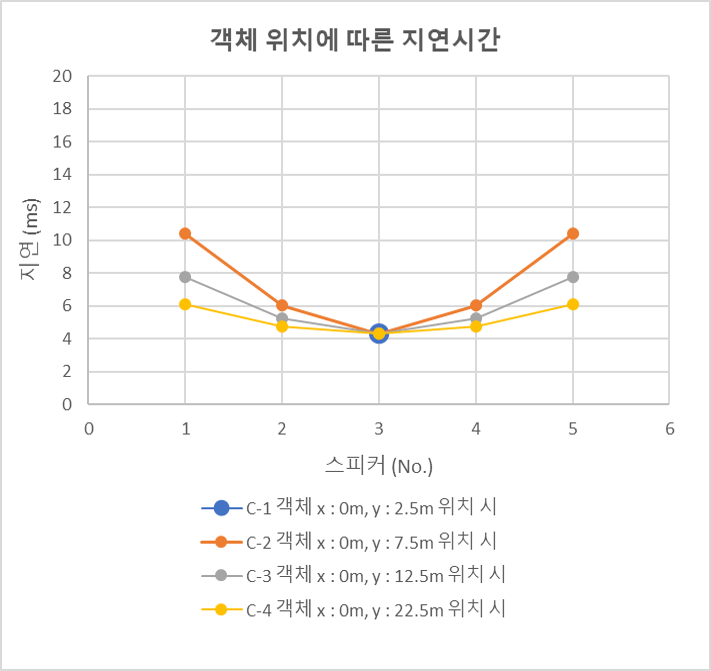
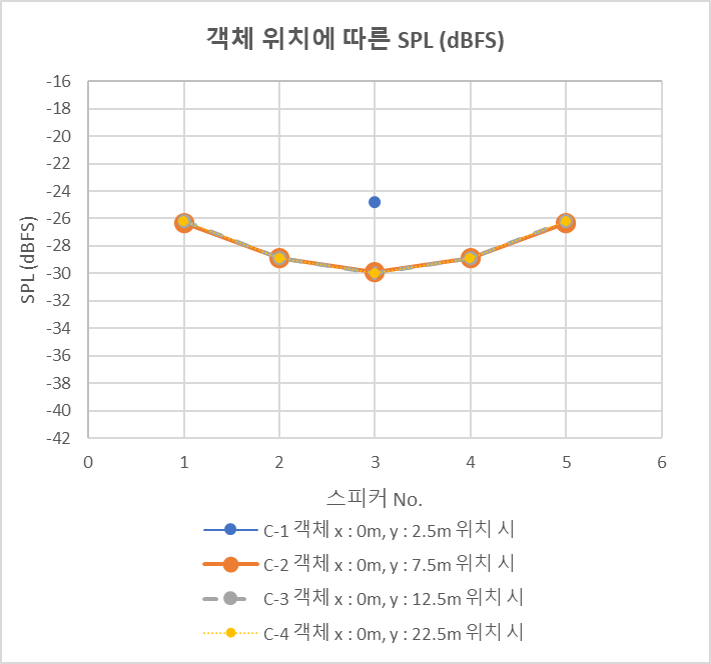
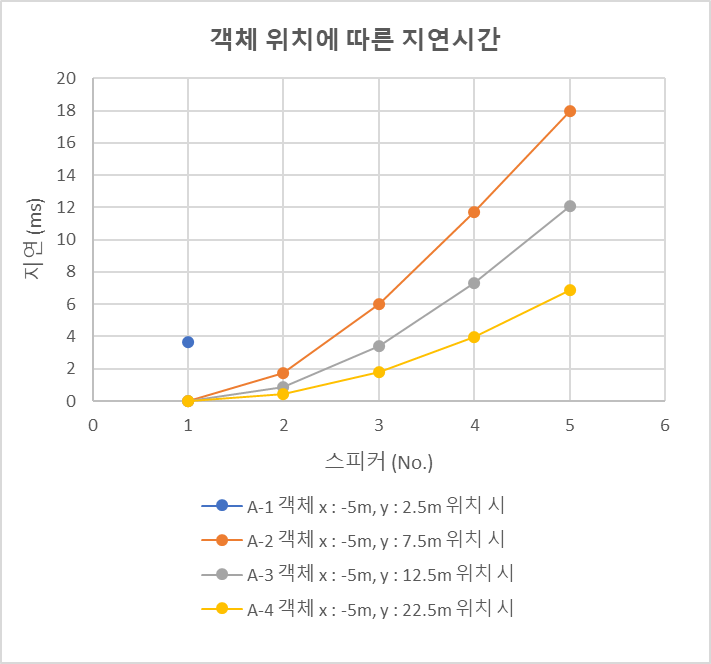
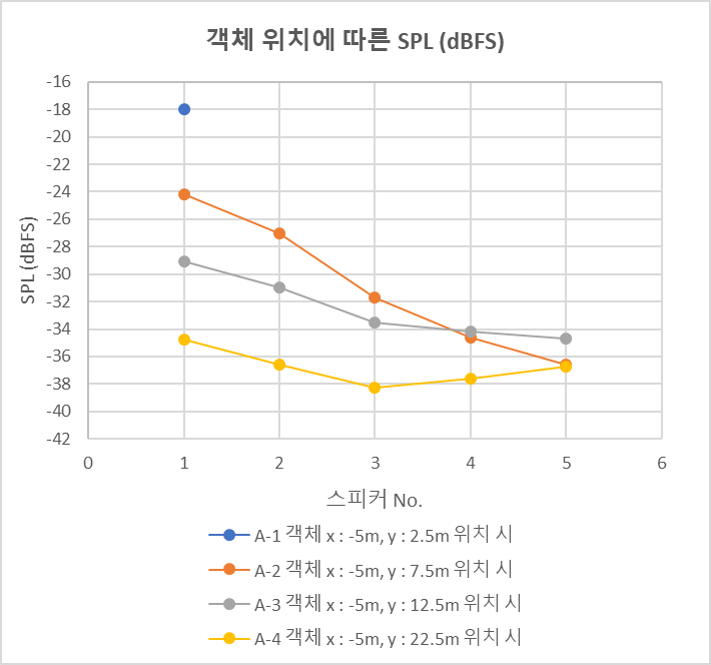
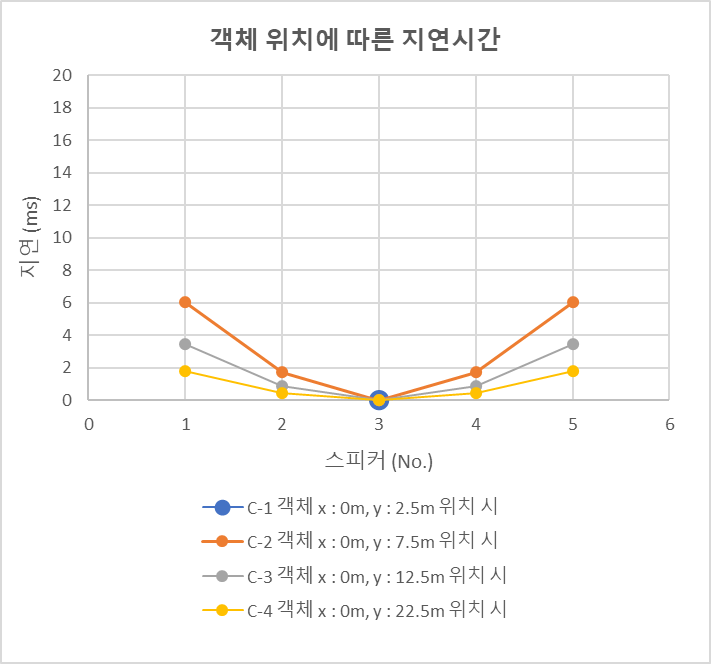
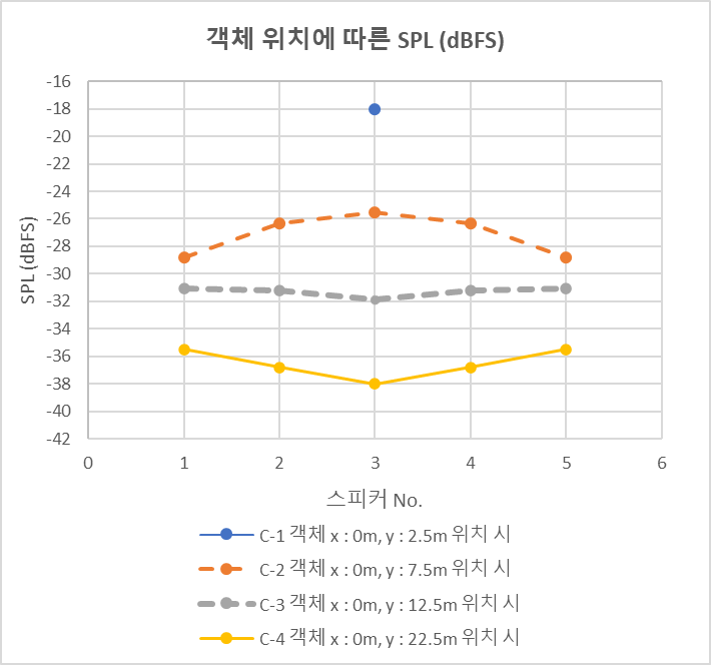
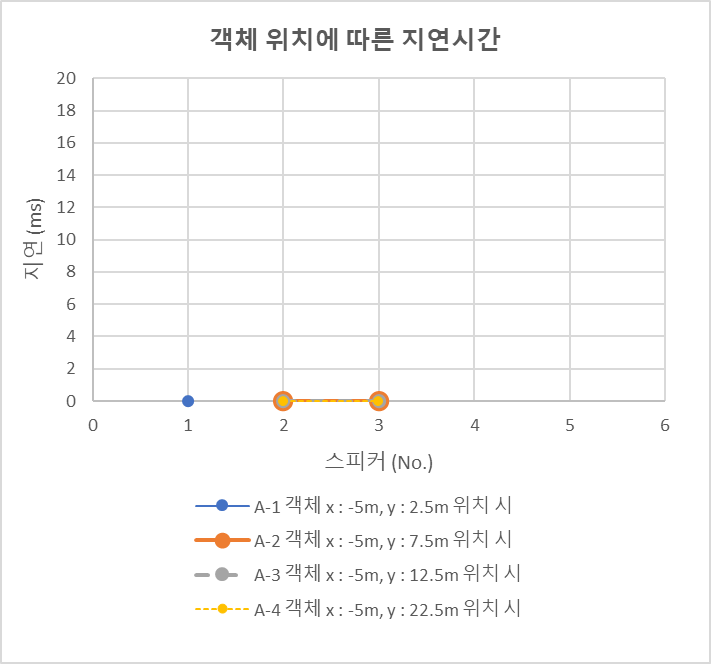
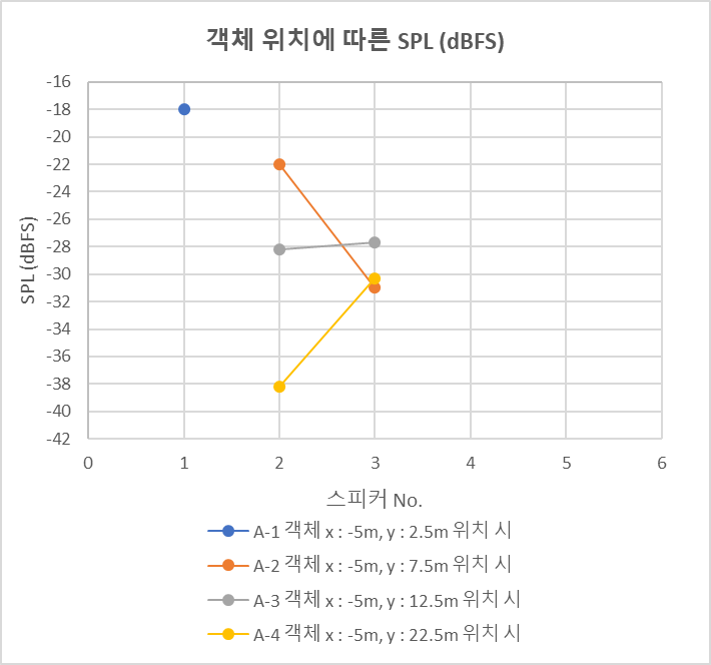
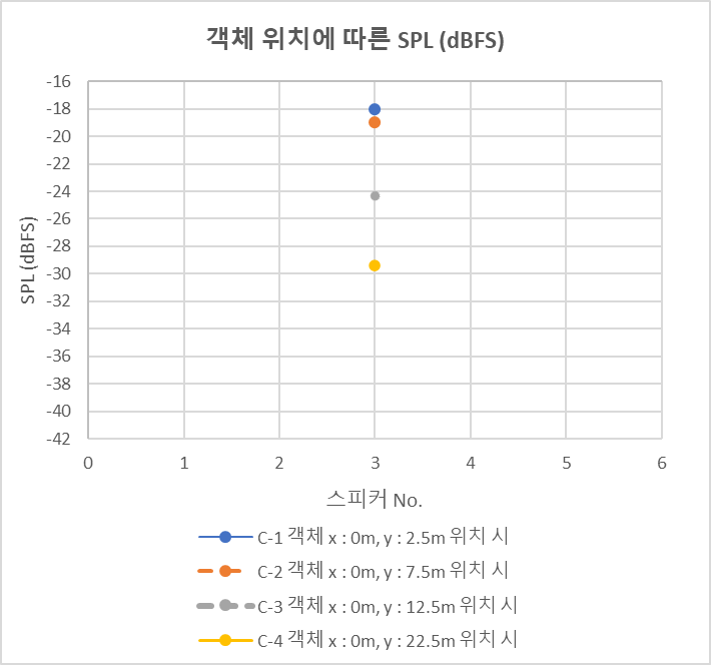
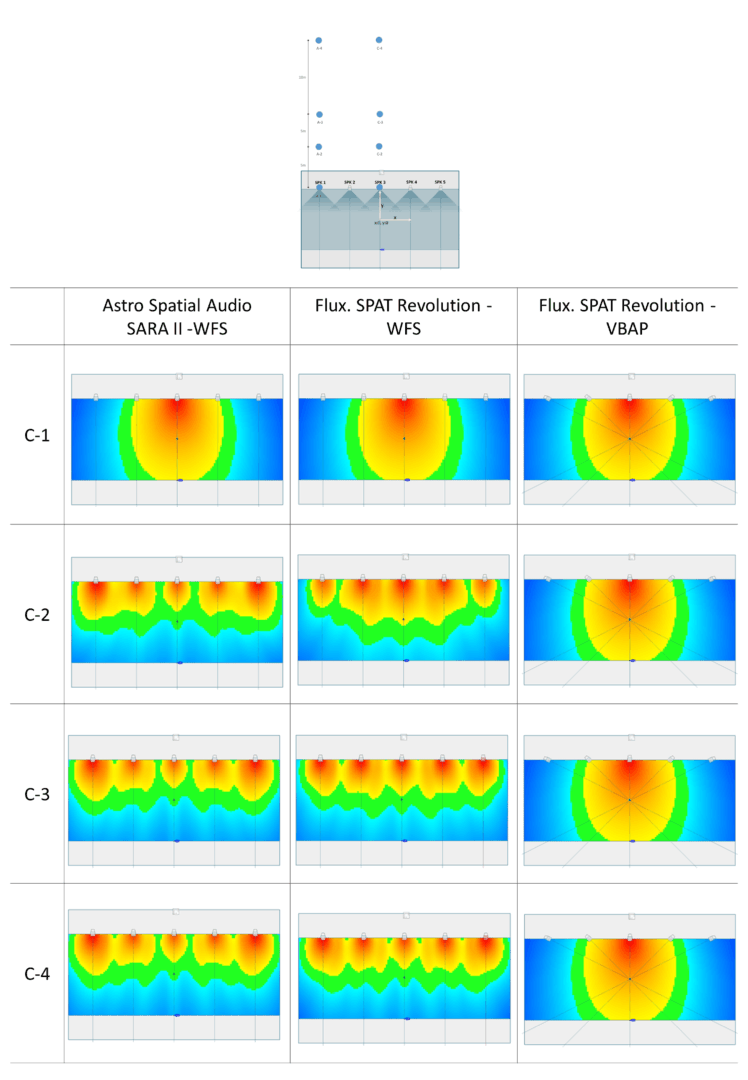
이머시브 시스템에서도 소리의 위치표현은 시간과 진폭을 이용해서 나타난다. Astro Spatial Audio. SARA II의 WFS 패닝알고리즘 연산과 Flux. SPAT의 WFS 패닝알고리즘 연산은 다른 결과값이 나타난다. 하지만 시간과 진폭을 이용하는 것은 동일하다. (그림19~그림26) 또 Flux. SPAT의 VBAP 패닝알고리즘은 시간지연을 전혀 사용하지 않고, 레벨의 변화로만 소리의 위치를 표현한다. (그림 27~그림30)
객체의 위치에 따른 소리의 변화를 이머시브 시스템의 연산 결과값을 측정하여 패턴을 형성해 이해하고자 했다. 이 패턴은 상대 값으로 같은 위치에서의 다른 엔진 및 패닝알고리즘의 차이를 확인할 수 있다.
같은 객체의 위치여도 제조사에 따라 나타나는 결과 값은 다르다. 패닝알고리즘이 같은 엔진의 경우에도 패턴 및 소리의 결과가 다른 형태로 나타난다.
객체의 움직임에 따른 결과를 소리로 듣고, 자료를 통해 이해하는 것은 이머시브 믹싱에 빠르게 적응하게 한다.
추가적으로 이렇게 각 엔진별로 다른 연산으로 인한 결과값으로 인해 각 이머시브 시스템의 스피커시스템 얼라인먼트에 대한 부분도 어떻게 적용하고 사용 해야하는지 고민 해봐야하는 부분이다. ![]()


윤 현 철
소닉밸류 기술팀 부장
한국방송예술교육진흥원 외래강사